teci2
F.3. Elementos de un sistema de control
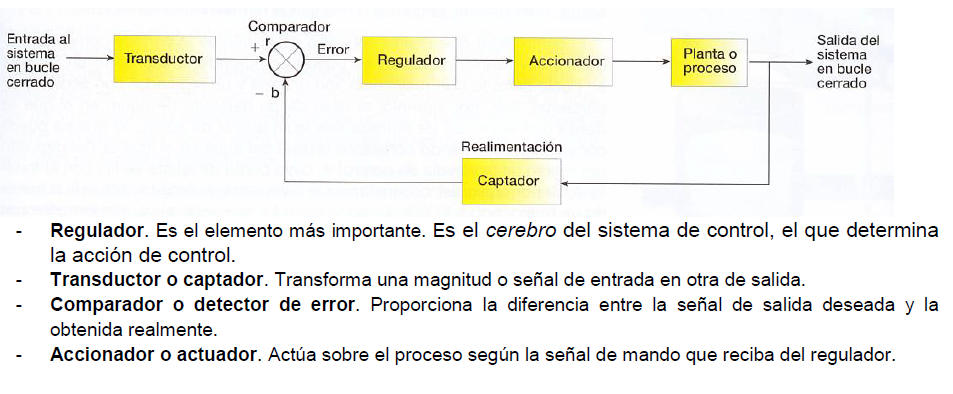
El regulador o controlador
El regulador o controlador es el elemento fundamental de un bucle de control. Se encarga de interpretar el error (desviación entre la señal de salida deseada y la realmente obtenida) y de intentar anularlo a través del mando del elemento accionador.
Hasta los años cincuenta, la tecnología de los reguladores era neumática, hidráulica o electromagnética. Posteriormente se introdujeron los reguladores electrónicos analógicos. Hoy en día se usa muy ampliamente el ordenador como elemento de control pues permite realizar funciones mucho más complejas que los reguladores convencionales.
Gran parte de los controladores elaboran la señal de mando del accionador a través de un tratamiento de la señal de error. Este tratamiento consiste en una amplificación del error, su integración con respecto al tiempo o su derivada con respecto al tiempo, dando lugar, respectivamente, a las siguientes acciones básicas de control:
– Acción proporcional (P)
– Acción integral (I)
– Acción diferencial o derivativa (D)
Acción proporcional.
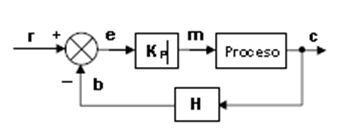
El tratamiento consiste en una amplificación de la señal de error. En este tipo de control el elemento final se modifica de manera proporcional al error: si el error es pequeño, el controlador dará origen a un pequeño cambio en la salida; si es grande, el cambio en la salida también será elevado.
La función de transferencia de este regulador es una constante: G(s) = Kp
Ejemplo: Sea un depósito de agua en el que se desea que el caudal de entrada sea igual al de salida. Esto lo queremos conseguir a base de mantener el nivel constante en el depósito por medio de la válvula de control “V”. Con el tornillo “A” se fija el punto de ajuste para el nivel deseado.
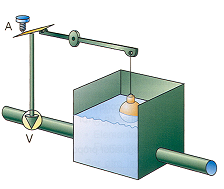
Si por una variación en el caudal de salida, por ejemplo un aumento, el nivel desciende, el flotador lo detectará y actuará a través de una palanca sobre la válvula V en el sentido de abrirla, para aumentar el caudal entrante hasta igualarlo con el caudal saliente.
Eso sí, cuando se vuelva a alcanzar la igualdad de los caudales, el nivel del depósito habrá descendido con respecto al anterior, produciéndose un error permanente.
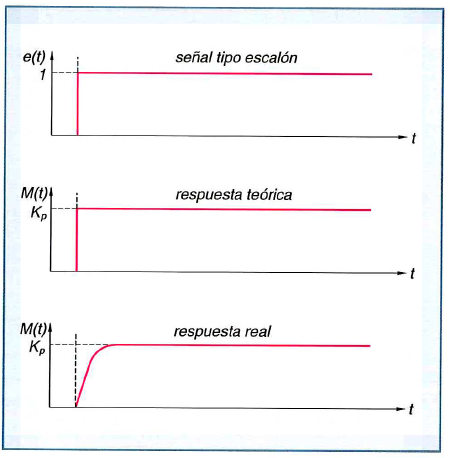
En este tipo de control si la señal de error es cero la salida del controlador también será cero. La respuesta de los controladores proporcionales es, en teoría, instantánea, con lo cual, el tiempo no interviene en el control. Sin embargo, en la práctica, esto no es así, de forma que si la variación dela señal de entrada es muy rápida, el controlador no puede seguir dicha variación y seguirá una trayectoria exponencial hasta alcanzarla salida deseada
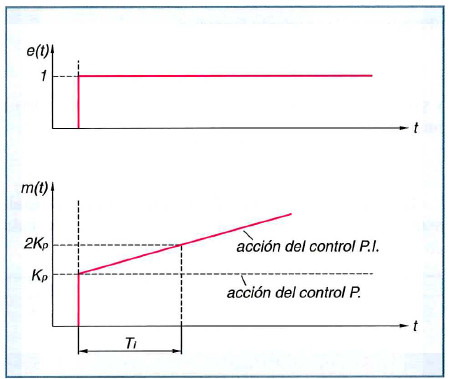
La respuesta en el tiempo del bloque de control proporcional, ante una señal de error del tipo escalón es la siguiente:
El problema principal de este tipo de control radica en el ajuste de la ganancia del sistema, que debe ser muy preciso, ya que, de lo contrario el sistema mantendrá siempre un error remanente.
Por ejemplo, si utilizamos un controlador proporcional para controlar el posicionamiento de un brazo robot de una cadena de montaje, puede suceder que al recibir una señal de error para desplazar el brazo un centímetro en el eje X, el desplazamiento sea únicamente de nueve milímetros. De este modo, el sistema tendrá siempre un error remanente de un milímetro por cada centímetro de desplazamiento.
Acción integral.
El regulador suministra una acción de control cuyo valor es proporcional a la integral de la señal de error. En este tipo de control la acción varía según la desviación de la señal de salida y el tiempo durante el que esta desviación se mantiene.
En el control integral, la salida del bloque de control responde a la integral de la señal de error:
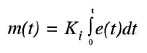
La función de transferencia del regulador de acción integral es: G(s) = Ki / s
La respuesta en el tiempo, del bloque de control integral, ante una señal de error del tipo escalón es la representada en la figura:
La pendiente de la rampa de acción integral es Ki, lo que implica que la velocidad de respuesta del sistema de control dependerá del valor de Ki.
El problema principal de los sistemas que utilizan un controlador integral es que la respuesta inicial es muy lenta y hasta pasado un tiempo el controlador no empieza a ser efectivo. Sin embargo, estos controladores sí eliminan totalmente el error de régimen permanente.
Ejemplo
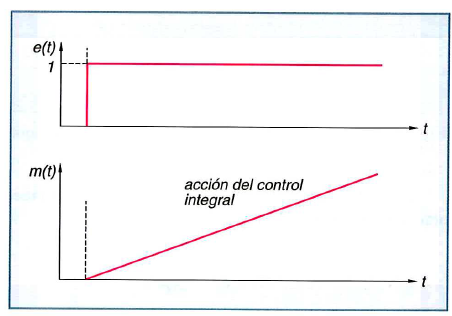
Este ejemplo es de un regulador proporcional + integral. Se trata de un depósito de agua en el que se quiere, como en el caso anterior, que el caudal de entrada sea igual al de salida a base de mantener constante el nivel. En este caso, la válvula de entrada está gobernada por un motor de corriente continua, cuya velocidad es proporcional a la tensión aplicada, y el sentido de giro depende del signo de la tensión aplicada. Al variar el nivel, el flotador desplazará el contacto deslizante del potenciómetro haciendo que se aplique una tensión al motor de corriente continua.
Si suponemos, por ejemplo, que el nivel desciende por un aumento del consumo, el contacto deslizante “q” se desplaza sobre el potenciómetro hacia arriba, aplicando una tensión positiva al motor proporcional al desnivel. La válvula seguirá abriendo mientras el desnivel exista y no volverá a una posición estable hasta que el error de nivel haya vuelto a ser nulo. Por tanto, no puede existir error en régimen permanente.
Control Proporcional-Integral
Para solventar el problema que presentan los controladores integrales, se recurre a combinarlo con un controlador proporcional, obteniendo un controlador proporcional e integral (PI). La salida del bloque de control PI responde a la ecuación:
![]()
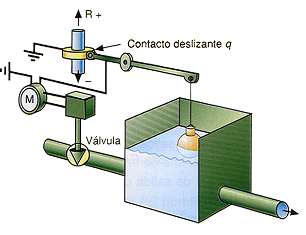
La respuesta de un controlador PI es la suma de las respuestas de un controlador proporcional y de otro integral, lo que proporciona una respuesta instantánea al producirse la correspondiente señal de error provocada por el control proporcional y un posterior control integral que se encargará de extinguir totalmente la señal del error.
Respuesta de un controlador proporcional e integral ante una señal de error del tipo escalón:
Por ejemplo, si aplicamos un control proporcional e integral para controlar el posicionamiento de un brazo robot de una cadena de montaje, al recibir una señal de error para desplazar el brazo un centímetro en el eje X, se producirá un desplazamiento brusco provocado por el control proporcional que lo acercará, con mayor o menor precisión, al punto deseado y, posteriormente, el control integral continuará con el control del brazo hasta posicionarlo en el punto exacto, momento en el que desaparecerá totalmente la señal de error y, por tanto, eliminando totalmente el posible error remanente del sistema.
Acción diferencial.
En este caso, la salida ha de cambiar proporcionalmente a la variación de la medición. La acción diferencial es de tipo anticipativo, detecta si va a existir una sobreoscilación excesiva, proporcionando la acción de control adecuada para evitarla antes de que tenga lugar. Esta acción, al igual que la integral, nunca se emplea sola, sino que va unida a la acción proporcional (se llama entonces regulador PD) o a la proporcional e integral (se denomina entonces regulador PID).
La acción diferencial proporciona una señal de control proporcional a la derivada del error. Por tanto, esta acción es proporcional a la rapidez con la que varía el error (tener en cuenta que la derivada de una función es igual a la pendiente de la curva que representa a dicha función). Por ello, se le puede atribuir un efecto anticipativo, ya que al actuar según el valor de la pendiente de la curva de error, o sea, la tendencia del error, detecta anticipadamente si va a haber una obreoscilación excesiva, proporcionando la acción de control adecuada para evitarla antes de que tenga lugar.
Por tanto, la acción diferencial aumenta la velocidad de respuesta de un sistema de control, mejorando la respuesta transitoria, aunque a costa de una menor precisión en la salida durante el tiempo que el control derivativo esté actuando. No perjudica al régimen permanente, pues cuando el error se estabiliza (en 0 o en un valor cualquiera) ya no actúa la acción diferencial.
Control PD
La acción derivativa por sí sola no se utiliza, puesto que, para señales lentas, el error producido en la salida en régimen permanente es muy grande y si la señal de mando deja de actuar durante un tiempo largo la salida tenderá hacia cero y no se realizará entonces ningún control. La utilidad de este tipo de controlador radica en aumentar la velocidad de respuesta de un sistema de control, ya que, como se comentó en los controladores proporcionales, aunque la velocidad de respuesta teórica de un controlador proporcional es instantánea, en la práctica no es así, pudiendo ser una rampa o una exponencial de una duración considerable.
Al incorporar a un controlador proporcional las características de un controlador derivativo, se mejora sustancialmente la velocidad de respuesta del sistema, a costa de una menor precisión en la salida (durante el intervalo de tiempo en que el control derivativo esté actuando).
En el control proporcional y derivativo (PD), la salida del bloque de control responde a la ecuación:
La respuesta de un controlador proporcional y derivativo ante una señal de error del tipo rampa unitaria:
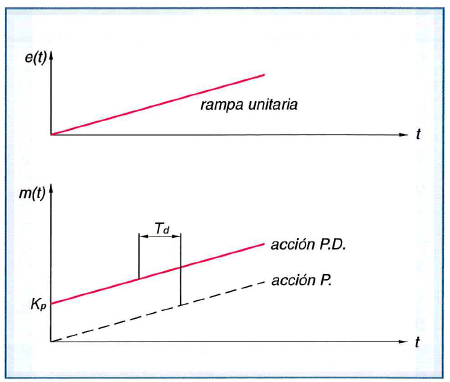
Un exceso en el dimensionado del control derivativo de un controlador PD puede ser causa de inestabilidad en el sistema haciendo que la salida, ante variaciones bruscas, no sea válida. Por ejemplo, si durante la conducción de un automóvil, de repente, se produce alguna situación anómala (como un obstáculo imprevisto en la carretera, u otro vehículo que invade parcialmente nuestra calzada), de forma involuntaria, el cerebro envía una respuesta casi instantánea (reflejos) a las piernas y brazos, de forma que se corrija la velocidad y dirección de nuestro vehículo para sortear el obstáculo. Si el tiempo de actuación es muy corto, el cerebro tiene que actuar muy rápidamente (control derivativo) y, por tanto, la precisión en la maniobra es muy escasa, lo que “derivará” a efectuar movimientos muy bruscos de forma oscilatoria. Estos movimientos bruscos pueden ser causa de un accidente de tráfico. En este caso, el tiempo de respuesta y la experiencia en la conducción (ajuste del controlador derivativo) harán que el control derivativo producido por el cerebro del conductor sea o no efectivo.
Controladores PID
En los controladores PID se aúnan las ventajas de los tres tipos de controladores básicos, de forma que si la señal de error varía lentamente en el tiempo, predominan la acción proporcional e integral y, si la señal de error varía rápidamente, predomina la acción derivativa.
En el control proporcional, integral y derivativo (PID), la salida del bloque de control responde a la ecuación:
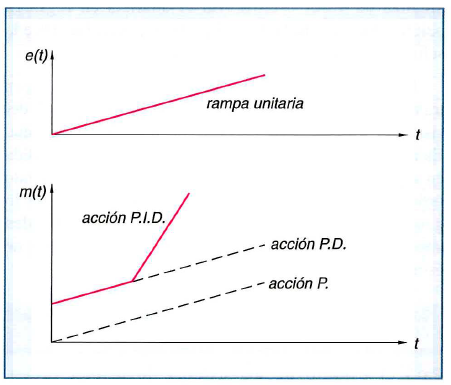
La respuesta en el tiempo, del bloque de control proporcional e integral, ante una señal de error del tipo rampa unitaria es la representada en la figura:
Como ejemplo de un sistema de control PID, podemos tomar de nuevo la conducción de un automóvil. Cuando el cerebro da una orden de cambio de dirección, en una maniobra normal, la acción de control predominante del sistema es la proporcional, que aproximará la dirección al punto deseado de forma más o menos precisa. Una vez que la dirección esté cerca del punto deseado, comenzará la acción integral que eliminará el posible error producido por el control proporcional, hasta posicionar el volante en el punto preciso. Si la maniobra es lenta, la acción derivativa no tendrá apenas efecto. Si la maniobra requiere mayor velocidad de actuación, la acción de control derivativo adquirirá mayor importancia, aumentando la velocidad de respuesta inicial del sistema y posteriormente actuará la acción proporcional y finalmente la integral. En el caso de una maniobra muy brusca, el control derivativo tomará máxima relevancia, quedando casi sin efecto la acción proporcional e integral, lo que provocará muy poca precisión en la maniobra.
Obra publicada con Licencia Creative Commons Reconocimiento Compartir igual 4.0