En los sistemas de control de bucle cerrado parte de la señal de salida, convenientemente tratada, se realimenta, es decir, se introduce de nuevo en el sistema como una entrada más. Esta realimentación permite al sistema de control del proceso que sepa en todo momento qué está sucediendo en la salida, de forma que, si se produce alguna variación sobre la salida prevista, el sistema de control reacciona ajustando los parámetros del proceso para obtener la salida adecuada. El horno con regulación termostática y el sistema de escritura a mano son ejemplos de sistemas de control realimentado, puesto que la salida del sistema es en todo momento evaluada y realimentada para ser comparada con la entrada y así obtenerla salida deseada. Otros sistemas de control más elaborados lo constituyen el sistema de navegación automática de un avión (ver figura), los sistemas de seguimiento de misiles y los sistemas de posicionamiento de un satélite.
Las ventajas e inconvenientes de los sistemas de control en bucle cerrado las podemos resumir en:
- Ventajas: posibilidad de utilizar componentes más económicos e imprecisos o con mayor tolerancia que en los sistemas de bucle abierto, consiguiendo grados de precisión muy altos en la respuesta del sistema.
- Desventaja: la dificultad existente en el diseño de estos sistemas para que sean estables. Por otra parte, la cantidad de componentes utilizados por los sistemas de control de bucle cerrado es muy superior a los utilizados por los sistemas de control en bucle abierto.
Los sistema de control de bucle cerrado (ver figura) deben utilizarse, fundamentalmente, cuando el sistema puede recibir del exterior perturbaciones o variaciones imprevisibles que puedan modificar el comportamiento del sistema.
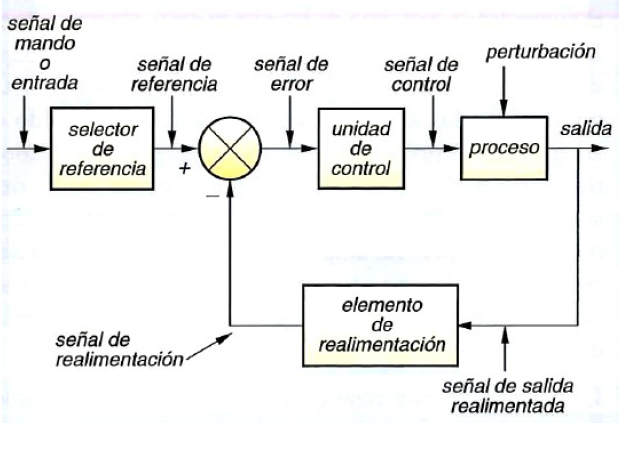
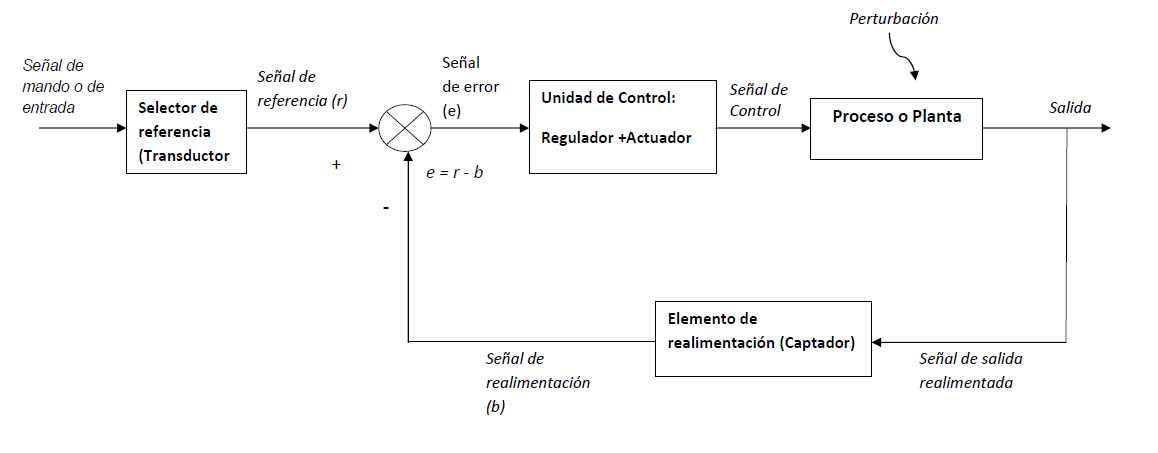
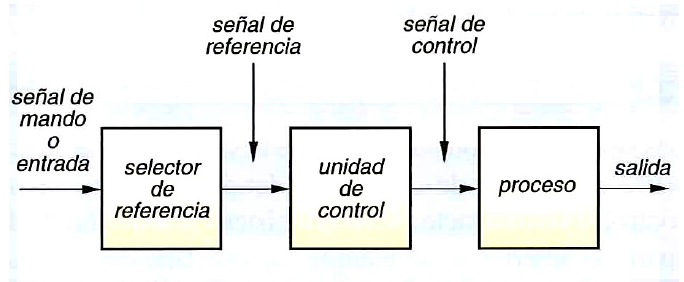
La figura anterior representa un diagrama funcional, también denominado diagrama de bloques, del funcionamiento de un sistema de control de bucle cerrado. En este diagrama se distinguen cuatro bloques significativos, que son:
- Proceso: también denominado planta. Este bloque realiza las operaciones de manipulación necesarias para obtenerla variable de salida.
- Unidad de control: también denominado elemento de control. Adapta la señal de error para que pueda actuar sobre el proceso o planta, reajustándolo cuando se producen perturbaciones o interferencias. Normalmente consiste en un sistema mecánico, neumático o eléctrico que amplifica la señal de error hasta un nivel conveniente para poder actuar sobre el proceso.
- Elemento de realimentación: este elemento recoge una muestra de la salida y la convierte en una señal de similares características a la señal de referencia para poder compararla con ella. Los elementos de realimentación normalmente son sensores o captadores que convierten una magnitud física en una magnitud eléctrica; por ejemplo, un sensor térmico, que convierte variaciones de temperatura en variaciones de corriente o tensión. Si el nivel de salida del sensor no es lo suficientemente grande como para poder ser comparado con la señal de entrada, el elemento de realimentación también incorporará un amplificador que amplifique la salida del sensor.
- Comparador: también denominado detector de error. Es un dispositivo que dispone de dos entradas, y cuya salida es la diferencia existente entre la entrada o señal de mando y la señal de realimentación; la señal resultante se denomina señal de error.
- Selector de referencia: este elemento convierte la señal de mando o entrada del sistema en una magnitud de similares características a la entregada por el elemento de realimentación, para que ambas puedan ser comparadas entre sí.
Las señales que intervienen en el sistema de control son:
- Señal de mando: es la señal de entrada al sistema que determina cuál será el nivel de salida deseado.
- Señal de referencia: es una señal que guarda relación directa con la señal de entrada, pero en una magnitud comparable a la de la señal de realimentación.
- Señal de realimentación: podemos considerarla como una muestra de la salida adaptada convenientemente para poder ser comparada con la señal de referencia.
- Señal de error: esta señales el resultado de comparar la señal de referencia con la señal de realimentación; si ambas señales son iguales, la señal de error será nula indicando que la señal de salida es la deseada y que no hay perturbaciones en el sistema. Si no son iguales, la señal de error nos indicará que existe una perturbación o que la salida no es la deseada.
- Señal de control o variable manipulada, es la señal de error convenientemente manipulada o tratada para que pueda actuar sobre el proceso o planta del sistema de control.
- Salida: también denominada variable gobernada, puesto que depende de la entrada o señal de mando.
- Perturbación: está constituida por todas las señales indeseadas que afectan al proceso o planta y, por tanto, tienden a modificar el funcionamiento del sistema. Pueden ser internas, cuando se generan en el propio sistema, como por ejemplo, por desgaste de elementos, picos de corrientes generados en motores, etc.; o externas, si éstas proceden de fuentes externas, como transformadores eléctricos de alta tensión, vibraciones del terreno, cambios bruscos de temperatura, etc. si ambas señales son iguales, la señal de error será nula indicando que la señal de salida es la deseada y que no hay perturbaciones en el sistema. Si no son iguales, la señal de error nos indicará que existe una perturbación o que la salida no es la deseada.