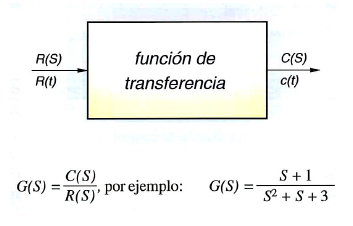
Para poder evaluarla respuesta temporal de un sistema de control se utiliza normalmente la relación existente entre la entrada y la salida de los componentes que integran el sistema o del sistema en sí. A esta relación se la denomina función de transferencia.
Se define como función de transferencia a la relación existente entre la salida y la entrada de un dispositivo o sistema. En realidad, la función de transferencia de un dispositivo representa la respuesta que éste tiene ante una señal de entrada determinada; por tanto, para determinarla función de transferencia de un sistema de control, lo que debemos hacer es aplicar a la entrada una señal conocida, tanto en tiempo como en amplitud, y analizar la salida del mismo.
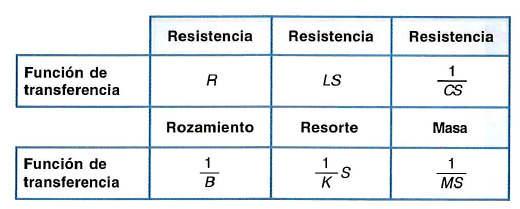
Podemos deducir fácilmente que los cálculos necesarios para resolver estos sistemas serán complejos, puesto que aparecen términos diferenciales o integrales, lo que hace imprescindible el conocimiento del cálculo integral o diferencial. Para solventar este problema y simplificar los cálculos, se recurre a una herramienta matemática denominada transformada de Laplace, que convierte de forma sencilla (mediante unas tablas de transformación) las ecuaciones integro-diferenciales en simples ecuaciones algebraicas. Así, la función derivación se transforma en una multiplicación de variable S, mientras que la función integración se convierte en una simple división de la variable S. En la tabla podemos ver la transformación de Laplace de tres elementos eléctricos y otros tres mecánicos básicos.
Debemos tener en cuenta que la variable s, en general, es una variable compleja, es decir, tiene una parte real y otra imaginaria. También podemos decir que la variable s está definida en el campo de los números complejos donde:
Para el estudio de un sistema de control el primer paso será descomponerlo en subsistemas o bloques más pequeños que permitan un estudio matemático más sencillo. Una vez dividido el sistema en subsistemas más simples, podemos utilizar dos métodos para el cálculo de las funciones de transferencias de los subsistemas o del sistema completo:
1. Conocidas las ecuaciones que definen a cada uno de los elementos de un sistema o subsistema de control, mediante la transformada de Laplace de los mismos podemos calcular de forma rápida la función de transferencia total del sistema o subsistema.
2. Utilizando el método general, introduciremos una señal patrón al sistema y observaremos la salida, determinando como función de transferencia del sistema la relación existente entre la señal de salida y la introducida a la entrada. Si analizamos el sistema en el dominio de Laplace, utilizaremos como entrada una señal muy concreta denominada pulso unitario o delta dirac, que consiste en un pulso muy estrecho y de amplitud muy grande, por ser su transformada de Laplace igual a “1”; de esta forma, la salida del sistema será directamente la función de transferencia del mismo (ver fig.). En la práctica, no se utiliza el pulso unitario por ser una señal muy difícil de conseguir y, en su lugar, se utiliza normalmente una señal denominada escalón, que consiste en una señal que pasa instantáneamente de un valor máximo (nivel 1) a un valor mínimo (nivel 0) que permanecerá constante tras el ensayo; la transformada de Laplace de esta señal es (1/S).
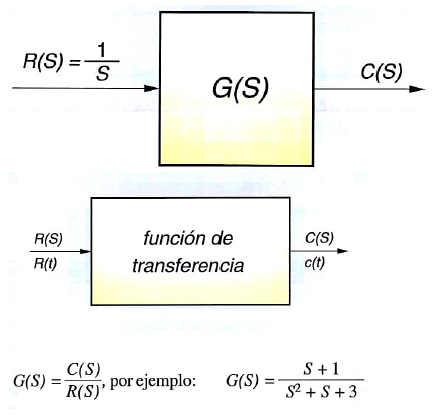
Por tanto, la salida del sistema:
En general, trabajando con la transformada de Laplace (dominio de Laplace), la función de transferencia de un sistema de control será una relación de polinomios en S.
Al polinomio del denominador se le denomina función o ecuación característica del sistema de control.
Una vez determinada la función de transferencia utilizando transformadas de Laplace G(S) (dominio de Laplace), la conversión de nuevo a funciones en el tiempo g(t) (dominio del tiempo) se realiza mediante unas tablas de traslación como la siguiente:
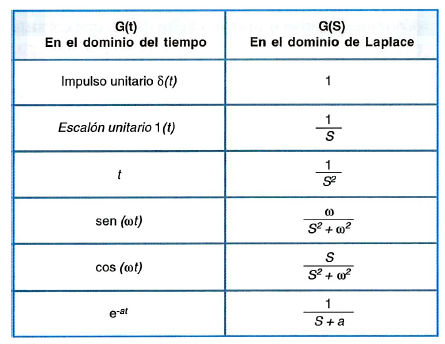
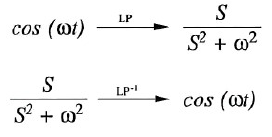
Si la transformación se realiza del dominio del tiempo al de Laplace, se dice que la transformación es directa en el caso contrario, del dominio de Laplace al del tiempo, se dice que la transformación es inversa
Ejemplo
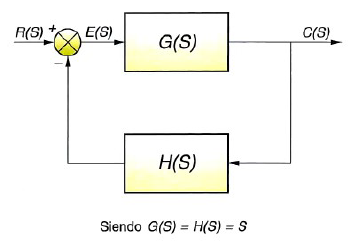
Determina la función de transferencia del siguiente sistema de control en el dominio de Laplace y en el dominio del tiempo (ver figura):
Solución:
Analizando el diagrama de bloques del sistema, podemos establecer las siguientes igualdades:
C(s) = E(s) · s
E(s) = R(s) - C(s) · s
ya que la salida se realimenta a través del bloque H(S). Sustituyendo la segunda igualdad en la primera, obtenemos:
C(s) = [R(s) - C(s) · s] · s =R(s) · s - C(s) · s2
Dividiendo ambas partes de la igualdad por C(s), obtenemos:
Si invertimos la ecuación anterior, obtendremos la función de transferencia del sistema de control:

Para pasar la función de transferencia del dominio de Laplace al dominio del tiempo, sólo tenemos que identificar la función algebraica resultante con una de las existentes en la tabla de transformación y deducir su equivalente en el dominio del tiempo. Si miramos en la tabla de translaciones, vemos que la transformada inversa de la función de transferencia calculada es similar a:
donde LP-1 representa que la transformación es inversa, es decir de Laplace al tiempo. Identificando términos, podemos decir: